摄影测量学数字测量实习:单模型4D生产与空中三角测量的理论与实践 |
您所在的位置:网站首页 › 倾斜摄影 正射影像是什么 › 摄影测量学数字测量实习:单模型4D生产与空中三角测量的理论与实践 |
摄影测量学数字测量实习:单模型4D生产与空中三角测量的理论与实践
1.下图为影像匹配后的结果,请思考并回答下列⑴与⑵这两个部分的问题。
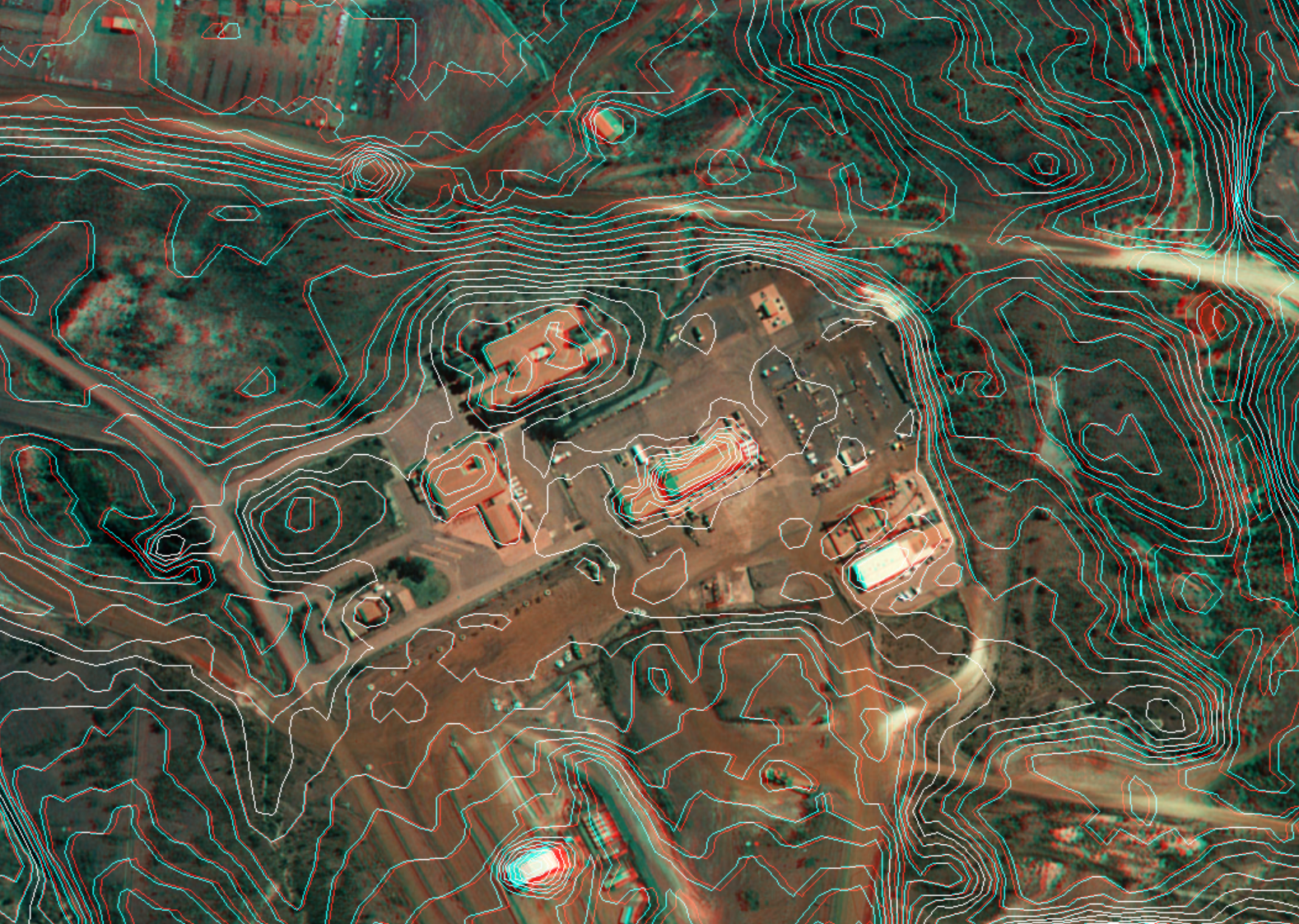 ⑴该匹配结果存在什么问题?如何修改匹配结果?
⑴该匹配结果存在什么问题?如何修改匹配结果?
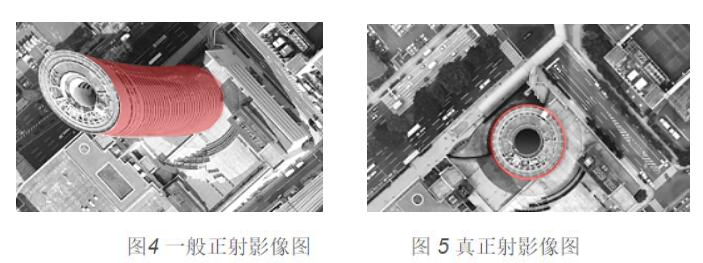
上图是影像自动匹配后的匹配结果编辑界面,还需要进行匹配后的基本编辑,具体内容为能根据等视差曲线(立体观察)发现粗差,并对不可靠区域进行编辑,达到最基本的精度要求。 该匹配结果存在什么问题? 等视差曲线在人工建筑物、树林、道路等上也有分布,使得匹配点不是地面上的点,而是物体表面上的点由于影像的不连续、被遮盖及阴影等原因,使得部分匹配点没切准地面如何修改匹配结果? 定义作业区,利用软件的平滑、拟合、格网点内插、量测点内插、定制平面等工具,在佩戴立体眼镜的前提下进行相应的处理 ⑵利用修改后的匹配点生成DEM和DOM,则该DOM存在什么问题?与真正射影像有何区别?正射影像(DOM: digital orthophoto map):将竖直摄影的航片消除像片倾斜引起的像点位移和限制或消除地形起伏引起的投影差,并归化为成图比例尺的影像(这项工作称为像片纠正)。 DOM存在什么问题? 该DOM影像是以2.5维的数字高程模型(DEM)为基础进行数字纠正计算的,而DEM是地表面的高程,即它并没有顾及地面上目标物体的高度情况,只能保证地表面是正射影像。因此,微分纠正所得到的影像虽然被叫作正射影像,但地面上3维目标(如建筑物、树木、桥梁等)的顶部并没有被纠正到应有的平面位置(与底部重合),而是存在投影差。 此DOM制作方法主要是利用中心投影(包括框幅式中心投影或线中心投影)影像通过数字纠正的方法得到。在纠正过程中,对原始影像上由一定高度的地面目标物体所产生的遮蔽现象在纠正后依然存在,这使得正射影像失去了“正射投影”的意义,使得正射影像在与其他空间信息数据进行套合时发生困难,使传统正射影像的应用受到一定的限制。 与真正的正射影像有何区别? DEM的获取过程中,利用数学曲面拟合地面进行内插忽略了各类建筑物的存在;DSM是数字表面模型,反映了地形起伏表面和各类建筑物、森林植被的顶面。 相对于传统DOM,真正射影像对航空摄影前期飞行要求更为严格。如按照国家相关规范,平地地区,飞行航带的的航向重叠和旁向重叠分别是60%和25%左右,而真正射要求至少分别达到68%和75%左右。 基于DEM和共线方程的数字微分纠正,获得的是常规DOM;基于DSM和共线方程的数字微分纠,正,获得的是真DOM。 常规DOM只改正了地形起伏引起的投影差,没有改正建筑物的顶面高度的投影差得到的只是起伏地面的正射影像。而真DOM上地形起伏和建筑物的投影差都得到改正,得到起伏地面和高出地面的人工地物、森林植被的正射影像。
检查点即实现将检查点按格网或任意形式进行分布,对生成的DEM在这些点处进行检查。将这些点处的内插高程和实际高程逐一比较得到各个点的误差,然后计算中误差。本次实习DEM使用该方法的参数为:点数=15,均值=-0.0,绝对均值=0.6,均方根=0.7,具体数据见下表。 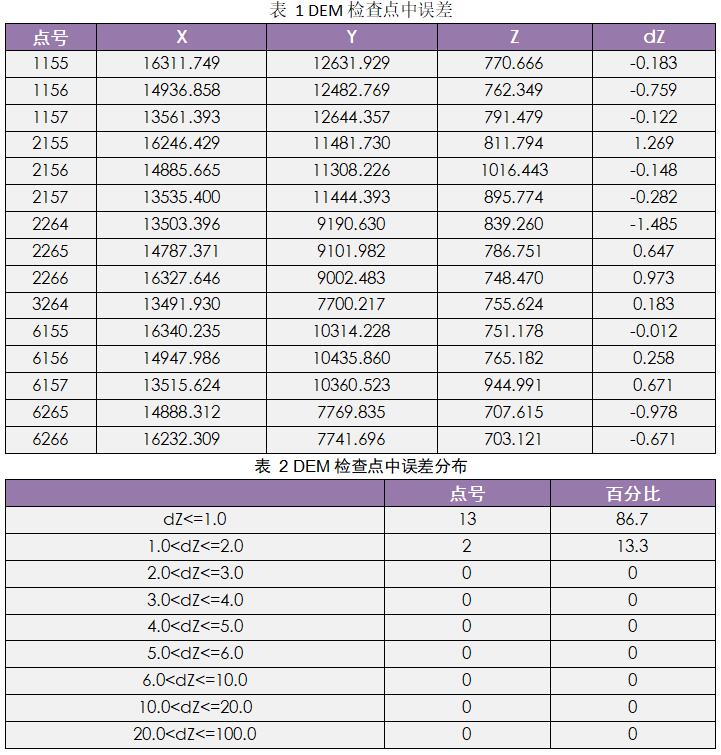
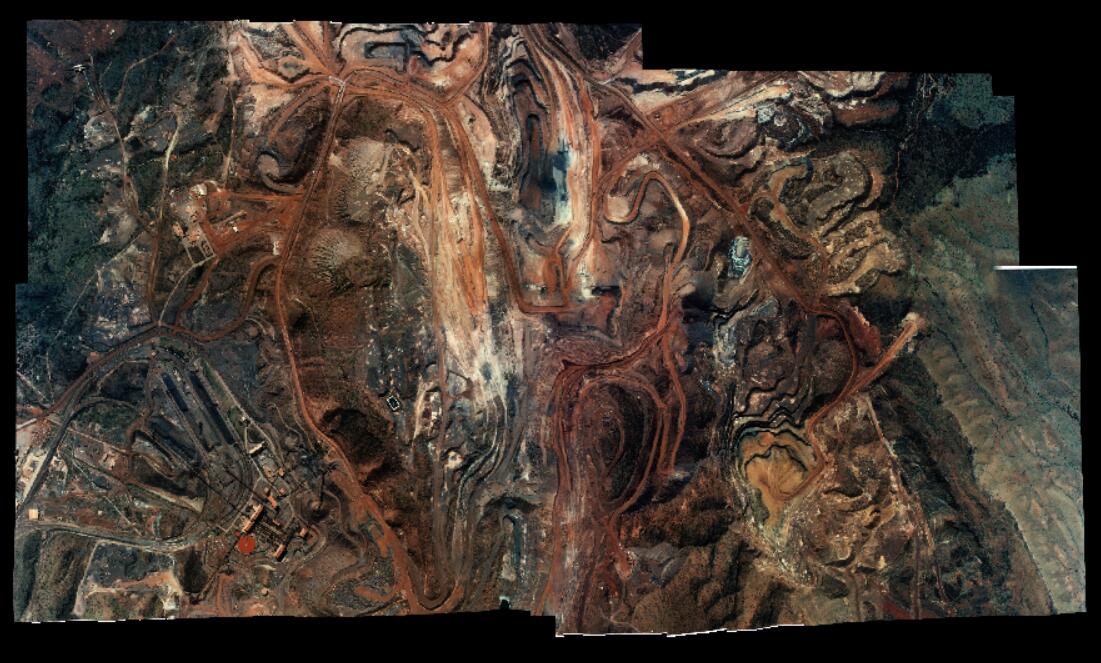
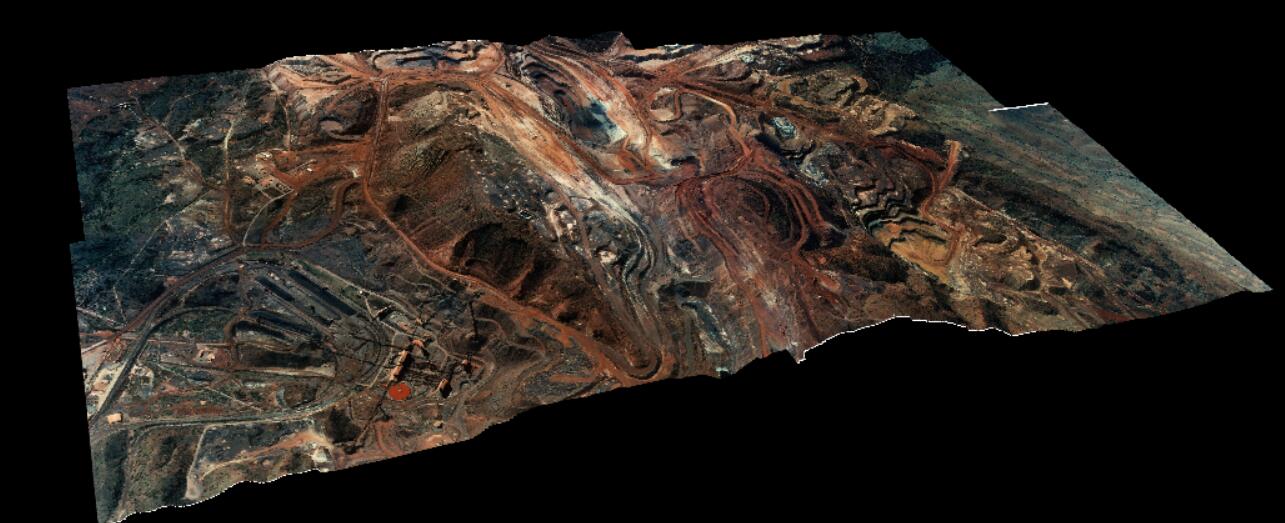
分析造成DEM误差的可能因素? 地形表面特征:大量的研究表明DEM的精度随着地形破碎程度的大小而变化,最大的误差往往出现在地形起伏或水平转折处如山脊线、山谷线、地形变化线等部位,并且它们之间的关系是呈明显的线性关联特征数据源误差:用来构建DEM的数据主要来源有野外测量、地形图数字化和摄影测量。各自对应不同的数据源如野外数据质量、地形图误差、航空相片误差采点设备误差:包括地形图手扶或扫描时数字化仪或扫描仪的误差;摄影测量的采点设备误差包括测图仪的误差和计算机计算有效位数人为误差:人为误差包括数字化对点误差、高程赋值误差和控制点转换误差等采样点密度和分布:采样点应该具有足够的密度并且避免数据贫乏区。地形结构是地形表面的骨架线,采样点一般应该分布在各个地形特征点、特征线处内插方法:内插点的计算高程与实际量测高程之间总存在差值DEM结构:虽然较高分辨率的DEM能反映地形细部,但是以牺牲计算机存储量为代价的,DEM分辨率要和原始数据相匹配 3.对本次实习的DOM进行整饰,给出整饰后的影像图。数字正射影像图(DOM)是利用数字高程模型(DEM),利用数字微分纠正技术,改正原始影像的几何变形,而要得到一幅标准图幅DOM地图,需多个像对的正射影像进行拼接镶嵌,所以DOM的质量由镶嵌工艺决定。由于多个影像灰度和摄影角度不同,使接边复杂程度远大于线划图接边。不仅包含地物几何坐标的拼接,同时影像色彩(灰度)的过渡会影响正射影像视觉的整体效果。  4.写出VirtuoZoEdu空三加密的流程,给出本次实习空三加密的精度报告,分析影响空三加密精度的可能因素。
4.写出VirtuoZoEdu空三加密的流程,给出本次实习空三加密的精度报告,分析影响空三加密精度的可能因素。
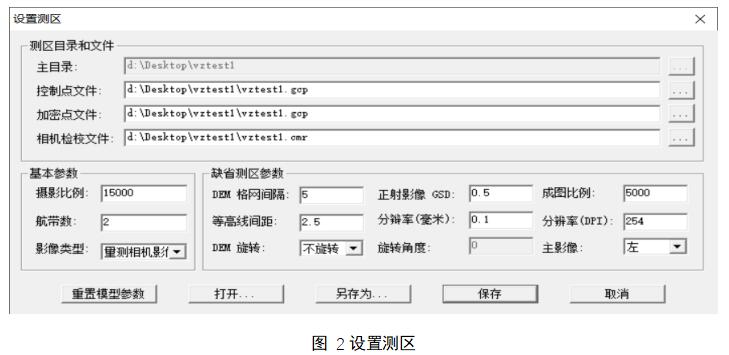
空中三角测量是立体摄影测量中,根据少量的野外控制点,在室内进行控制点加密,求得加密点的高程和平面位置的测量方法。其主要目的是为缺少野外控制点的地区测图提供绝对定向的控制点。 VirtuoZoEdu空三加密的流程 数据准备:一般所需要的资料数据有扫描(数字)航片、外业控制点数据、数字刺点、点位照片、测区布点略图、相机参数交件等。数据准备有资料分析(包括查看原始数字影像的分辨率、比例尺、重叠度等,查看相机检校参数,及其影像方位、框标的位置等,查看地面控制点数据及其点位与分布,检查POS/GPS数据完整性)与创建新测区并设置测区参数文件等步骤。在准备阶段不仅要仔细核对各参数和数据的准确性,而且要在时间上对整体工作有统筹的安排。
引入影像:完成原始影像的数据格式转换,具体内容为将原始影像转化为VZ格式的影像数据,并在选择选一条航线上的像片在选项中完成旋转,进行处理。
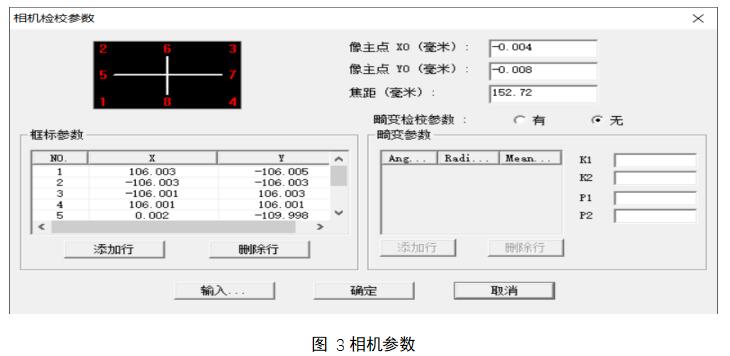
建立相机文件:将相机参数输入相应的文件中保存。
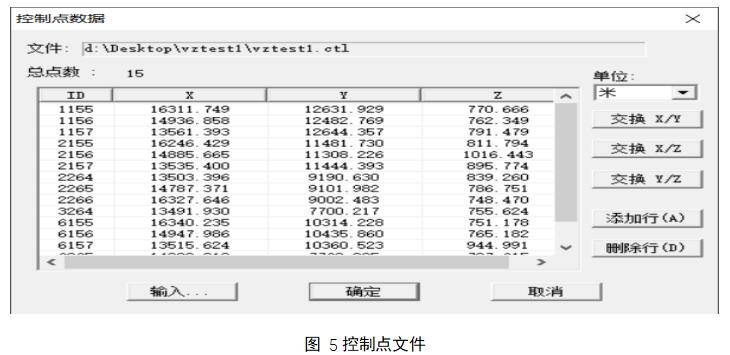
建立控制点文件:在引入影像后,我们要将该测区已知的点面控制点坐标输入相应的控制点文件中,完成地面控制点文件的数据录入。注意坐标分布,在必要时对输入的坐标进行交换。
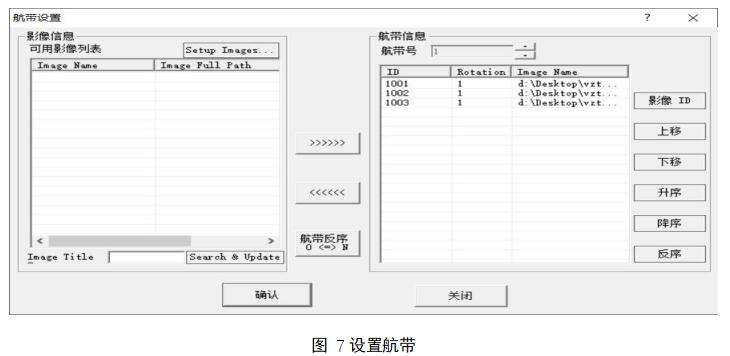
设置航带:注意航带号和航片的航带顺序。
自动内定向:内定向的目的是确定数字影像的扫描坐标系和像片坐标系之间的关系及数字影像可能存在的变形。VirtuoZoEdu提供自动和手动两种搜索框标中心模式,它朵用模版匹配技术,自动识别影像框标点和计算内定向参数,实时显示定向误差和定向参数,能实现测区影像的全自动内定向,可对整个测区进行批处理,节省处理时间。
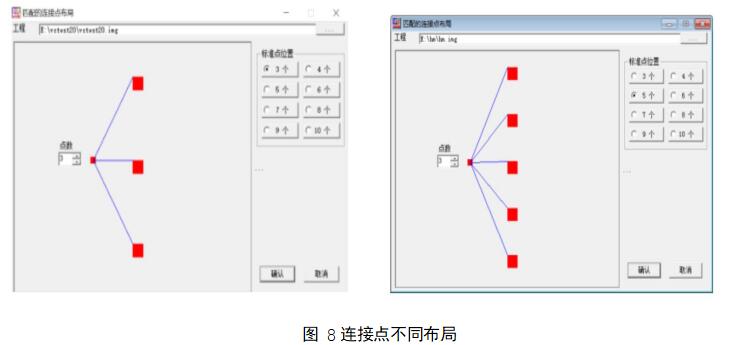
匹配连接点:在空三过程中,为了保证定向精度和便于后续易于探测粗差点,需要提取大量的连接点。VirtuoZoEdu采用基于高度自适应性的影像特征提取算法提取地物特征点,并采用基于高精度、高可靠性的影像匹配技术,将特征点自动转刺到相邻航片上。加密过程中,VirtuoZoEdu记录了详细的转点信息,用户很容易发现如定向失败、模型连接失败等异常情况,能及时准确作出相应的处理。
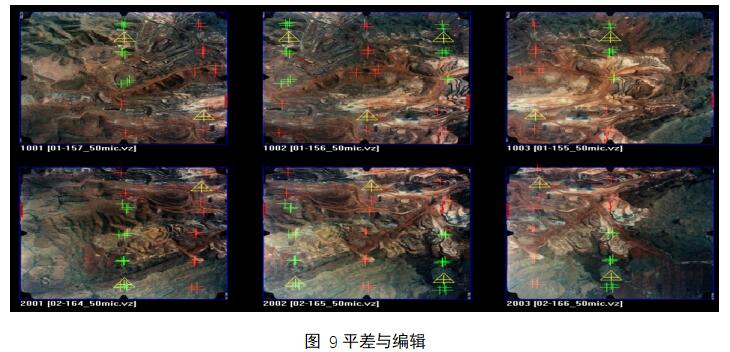
平差与编辑:这是空中三角测量中最关键的环节,主要包括:交互式编辑、量测控制点和平差计算。在平差计算时,每当加密一个测区时,首先应使用粗差检测。使用粗差检测的好处在于能够及时、准确地发现大的模型连接的粗差点及控制点的粗差点。
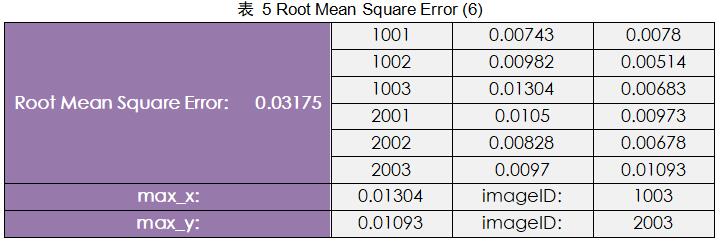
选择自由网平差,在图中寻找控制点并矫正,再进行控制点平差,最终生成质量报告。 空三加密的精度报告
影响空三加密精度的可能因素 影响空三加密精度的因素主要为:影像质量(分辨率、清晰度、重叠度、摄影比例)、飞行质量、像控点选取及精度(外业像控的选点、刺点、描述准确情况,内业加密时对像控点点位的判定准确程度,内业加密人员利用框标对像控点的切准情况)、加密点的选取及加密解算方法、加密人员的经验等。 影像质量:分辨率、清晰度、摄影比例对加密成果精度影响。摄影比例尺越大、影像分辨率越高、影像清晰度越高,加密成果质量就越高,加密成果的精度越好飞行质量:航向重叠度、旁向重叠度、航高的稳定性、像片的倾角、旋偏角对加密成果有较大影响,其中航高相对稳定情况、像片倾角对高程影响较大像控点测量精度:像控点是加密测量的基础和定向的依据,高精度的像控点能有效控制加密点的误差传递和积累。因此,像控点测量精度直接影响加密成果的精度,像控点测量精度越高加密成果精度越高外业像控的选点刺点、描述准确情况:像控点选在影像清晰、地物明显、宜判且宜于准确定位的地方。刺点点位描述要准确,易判,易懂,否则,会给加密成果带来较大误差内业加密时,加密人员对像控点点位的判定准确程度和利用框标对像控点的切准程度:加密人员对像控点的点位判断误差和框标的切准误差给加密成果带来一定误差。该误差虽难以避免,但可以降低。该项误差大小和加密人员的经验、影像的判读能力、立体感有关;如果加密人员对影像的判读能力强,立体感好,经验丰富,带给加密成果的误差就小些,否则,带给加密成果的误差就大内业加密点的选取,在不同像片上的判位误差:加密点的选取和其在不同片上的点位判断,其误差直接影响着加密成果的精度。该项误差主要与加密人员的经验和立体感有关。 5.本次实习利用了15个像控点进行空三加密,请调整控制点个数和分布,分析不同控制点个数和分布对空三加密的精度影响。以下是在同一测区的同一模型中,对控制点的数量进行调控的6种情境,分别在这6种情境中完成控制点平差,并导出平差结果。 需要注意的是,我们在第4问总结出内业加密时对像控点点位的判定准确程度,内业加密人员利用框标对像控点的切准情况、加密点的选取及加密解算方法等等因素,都取决于加密人员的经验,属于不可控的影响因素,在这一前提下,必然会对实验结果造成干扰。
无论区域大小,四周均匀布设控制点,四点布设平高控制点均有利于保证区域内部的精度。另外,计算过程中,平差开始时的迭代应将控制点的权值设计较小,在迭代过程中应根据单位权中误差的大小逐步加大控制点的权值,这样就能获得较高精度的平差结果。 在上述的所有情境中,采用四角点组布点,四周边均匀布设,加少量区域中间点的布点方式精度最高。采取点组均匀布设时,控制点的密度过小,多余的观测量不足,会影响到解算精度。适当增加控制的密度,可提高空三解算的精度,但是并不是控制点密度越大越好,过多的控制点不但大大增加外业和内业的工作量,而且对于空三精度的提高并没有太多的作用。此外,增加控制点加入平差计算时,加密人员可能出现的技术性错误的概率增加,这可能致使出现加密精度不增反减的情况。 由于无人机区域网空中三角测量的精度最弱点位于区域的四周,而不在区域的中央,区域内部精度高而且均匀,精度薄弱环节在区域的四周。从各方案比较分析可以得出:在条件允许的情况下,控制点应该均匀布设在摄区,并且要加强测区边角的控制。这样做不但可以在满足精度要求条件下减少控制点的数量,而且可以有效改善区域四周的精度。 无人机区域网空中三角测量的精度最弱点位于区域的四周,而不在区域的中央,区域内部精度高而且均匀,精度薄弱环节在区域的四周。从各方案比较分析可以得出:在条件允许的情况下,控制点应该均匀布设在摄区,并且要加强测区边角的控制。这样做不但可以在满足精度要求条件下减少控制点的数量,而且可以有效改善区域四周的精度。 |







【本文地址】
今日新闻 |
推荐新闻 |